Monday, May 23, 2016
Over 1000!!
Today we were able to officially pull 1102 pounds with the weight of Jared and Jasen on the cart. We believe that we could pull more weight but think our max is around 1300. We hope to continue to improve our robot for the rest of the week as we are now beginning boot camp for our final certification exams.
Friday, May 20, 2016
Smooth Sailing (Mostly)

This week was a successful week! We completed the weight pulling challenge! Our robot officially pulled 726 pounds and unofficially pulled over 1,000 pounds! However while completing the challenge we realized that our robot was veering to the right. We are currently in the process of correcting this problem. By next week we hope to have our robot fully functioning again so that we can move on to the next challenge!
Monday, May 16, 2016
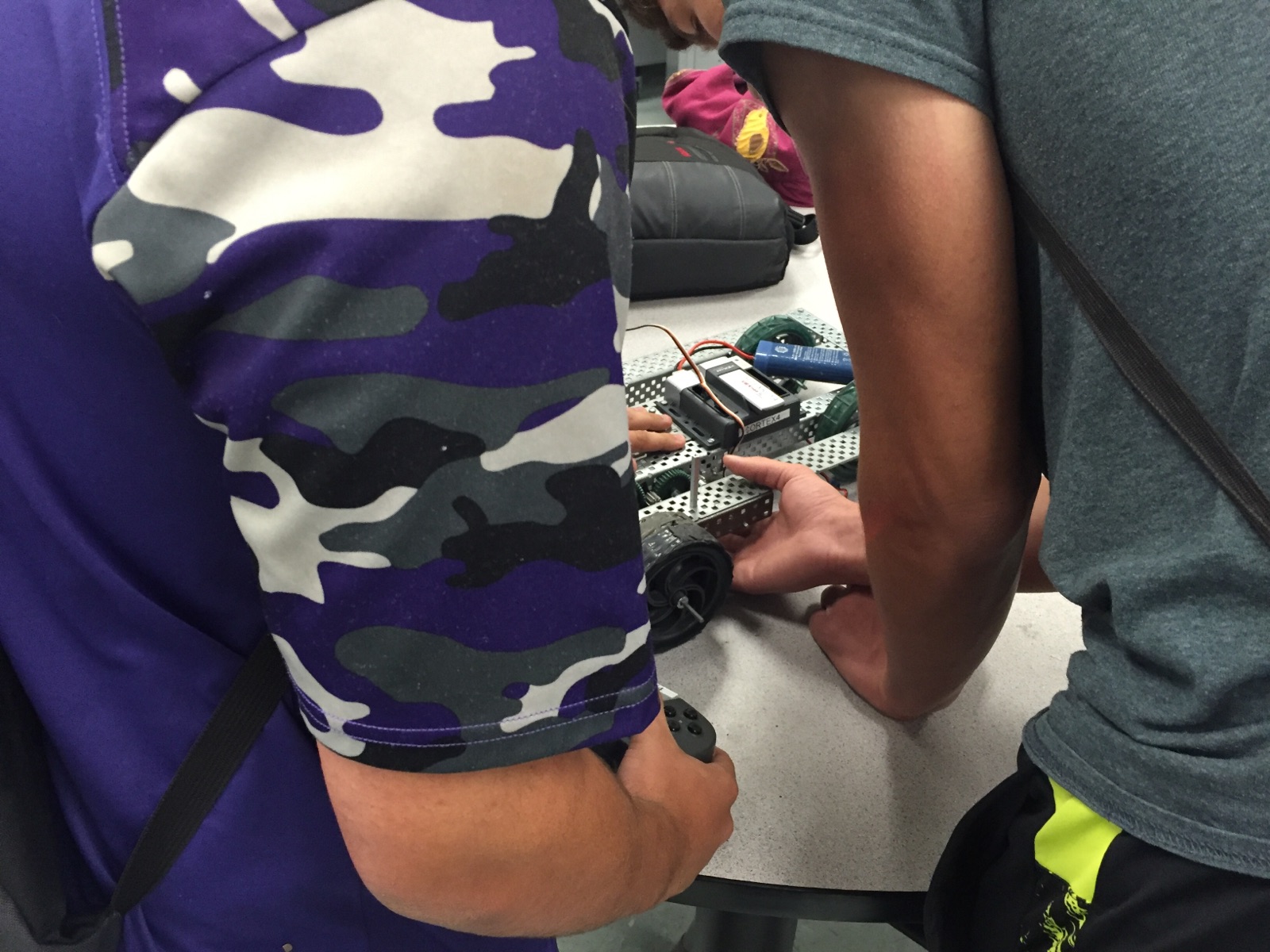
Almost Ready!
Today we worked on the getting the robot ready for the weight pulling challenge. We managed to almost complete our design. If everything goes well, tomorrow we will attempt to complete the challenge. It seems that as time goes by, our team is gets better and better at solving problems and working together.


Friday, May 13, 2016
So Far, So Good!


This week was very successful! we completed the challenge and have moved on to the next one. They new challenge will require us to pull a cart with our robot. We completely disassembled our robot and have started from scratch. As of today, we have made a lot of progress, our only speed bump has been trying to use under 18 collars as required by Mr. Martin. So far, so good!
Monday, May 9, 2016
Finishing!
This week our plan is pretty simple; finish the challenge by today! We have been having so many problems and disturbances with our bot and its time to finish. We plan to finish the autonomous by Tuesday. Also need to fix our gearing to make the bot a ton more reliable. We also hope to begin our tractor pull robot by Wednesday.

{kind=link}

Friday, May 6, 2016
Ready for the Challenge!
This week our group had little time to work on our robot due to testing days. However, the time we did have we used to make small adjustments on the robot to perfect it. This includes changing gearing, lowering the arm, and replacing motors. We are ready to do the official run for the robot now but can't due to the fact we don't have our classroom. We plan to do it Monday of next week!




Monday, May 2, 2016
Trail & Error


Last week while working on our robot, we realized that our original design to pick up the racket ball wasnt working as well as we thought. The motor wasnt able to spin the gears because the design was slightly crooked. We decided that fixing it wouldn't be successful so we abandoned the idea entirely and started anew. We bent a single piece of flat metal and connected the motor to a rubbery gear. The design works very well now. Success!
Subscribe to:
Posts (Atom)